
2025年春晚的舞台上,16台机器人身穿红花袄,手转红手绢,与16名舞蹈演员一起表演起了热情洋溢的东北大秧歌,使传统民间艺术在机器人的演绎下焕发了新的生命力。看到科技与艺术完美交融,机器人与人类和谐共舞,人们不禁惊叹,人形机器人已经发展到这个地步了吗?
图片来源:央视网
人形机器人,又称仿生人,其概念来源于人类对自身外观和行为、能力的模仿,其最早的概念可以追溯到文艺复兴时期达芬奇所绘制的人形机器人手稿。20世纪70年代,日本早稻田大学研制出了WABOT-1,这是人类初步实现全尺寸人形机器人双足行走的标志。2000年后,本田ASIMO实现动态奔跑与复杂环境适应能力,波士顿动力Atlas 则通过液压驱动完成跑酷等高难度动作,突破了机器人运动控制的极限。2020年至今,特斯拉Optimus等产品融合AI大模型与低成本硬件,推动了人形机器人在家庭服务、工业物流等场景加速落地。随着机器人技术与人工智能、生物仿生、新材料等技术的融合愈发深入,人形机器人正从实验室走向多元场景。
本文将会从专利的角度,解析人形机器人的行业发展现状和国内外主要玩家的知识产权保护情况。
(一) 人形机器人领域技术创新趋势分析
从近二十年的专利公开趋势来看,我们发现,近二十年来,人形机器人领域的专利申请量处于上升态势,在2014年之后加速增长,尤其是近三年,该领域的专利公开量激增,呈现出了爆发的趋势。
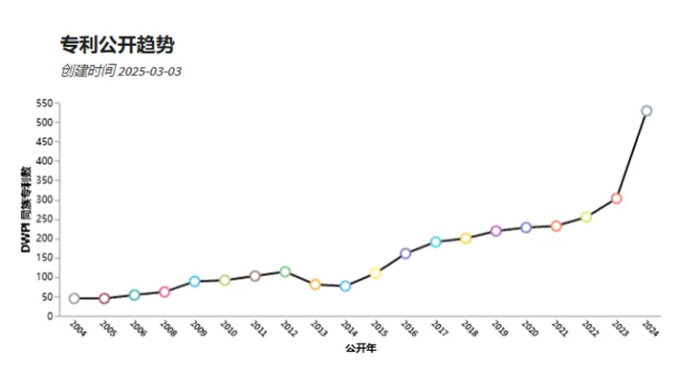
图1:专利公开趋势
(Source:Derwent Innovation 德温特创新平台)
从创新来源国来看,人形机器人领域技术创新最活跃的国家是中国、日本和美国,其中中国的专利公开量最多,表明中国对于人形机器人技术领域已经在进行积极的布局并累积了一定的技术优势。
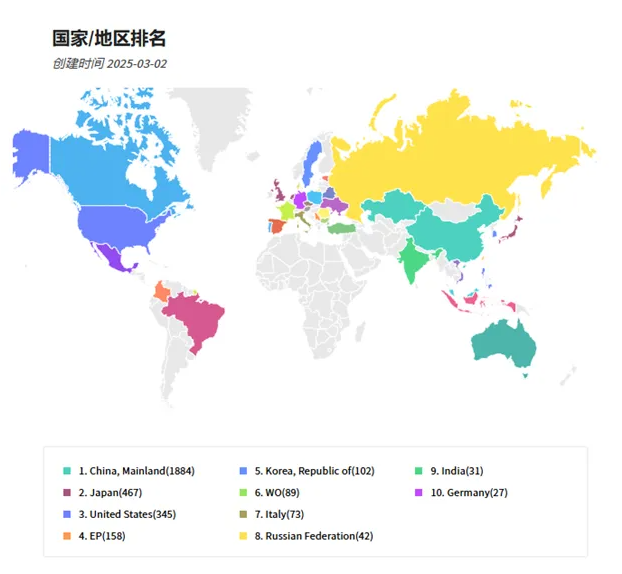
图2:专利公开国家/地区排名
(Source:Derwent Innovation 德温特创新平台)
对人形机器人领域申请量排名前五的国家过去20年间的申请量进行统计,发现日本在该领域具有先发优势,早期专利申请量占据主导地位,然而近年来其专利申请增速放缓。相对地,中国自2014年起专利申请量增速显著,在全球专利申请中占比逐年升高,逐渐从技术 “跟跑者” 跃升为技术 “领跑者”。
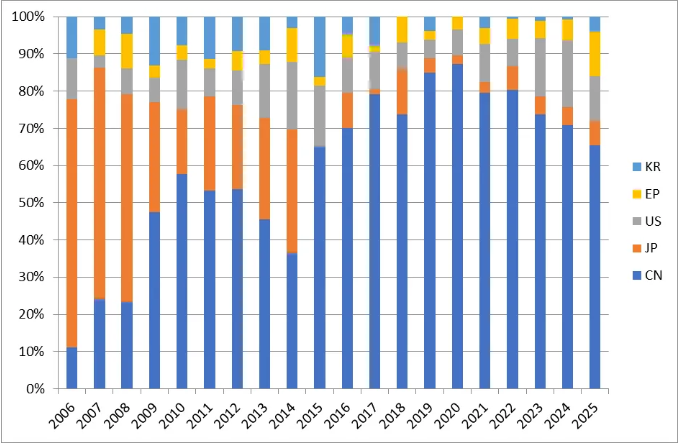
图3:五国专利公开趋势
(Source:Derwent Data Analyzer 德温特数据分析软件)
(二)人形机器人领域顶级玩家分析
从优化的专利权人排名可以看出,人形机器人领域,拥有最多专利的前五名玩家,分别是本田、清华大学、丰田、深圳优必选和之江实验室。在排名前20的专利权人中,有12位专利权人来自中国,5位专利权人来自日本,来自韩国、美国、意大利的专利权人各一位。

图4:优化的专利权人
(Source:Derwent Innovation 德温特创新平台)
通过对专利权人的类型研究发现,政府机构拥有的专利量较少,并非该领域的主导者。人形机器人领域的创新主要来自企业和学术机构,早期该领域的研究主要由企业主导,近年来,学术机构的申请量所占比例逐年增加。
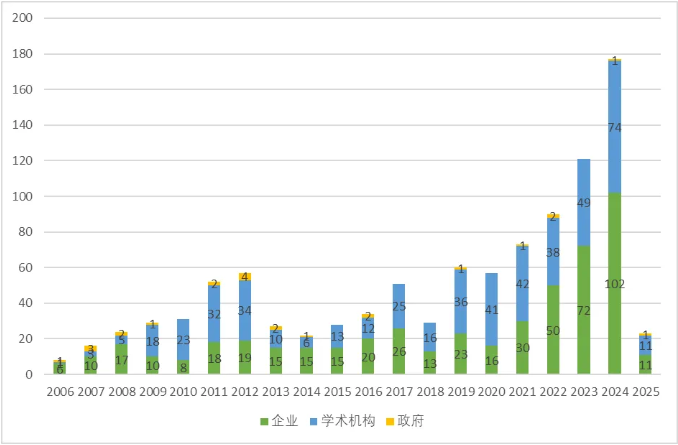
图5:专利权人类型分析
(Source:Derwent Data Analyzer 德温特数据分析软件)
选取人形机器人领域具有代表性的三个主要的专利权人——本田、清华大学、深圳优必选作为研究对象,对三个专利权人进行技术构成分析发现:三个主要的专利权人都在B25J9/00 (程序控制机械手)、B62D7/00(机动车的转向拉杆系)、B25J15/00(机械手的夹头)、 B25J17/00(机械手的接头)有所布局,其中清华大学在B25J15/00(机械手的夹头),进行了大量的专利布局,显示出清华大学的研究重点可能在于人形机器人的手指;而深圳优必选除了在机械手相关的分类号下有专利申请外,在G05D1/00 (运载工具的位置、航道、高度或姿态的控制,例如自动驾驶仪)也进行了大量布局,显示了深圳优必选公司的研究重点可能在于人形机器人的运动控制方面。
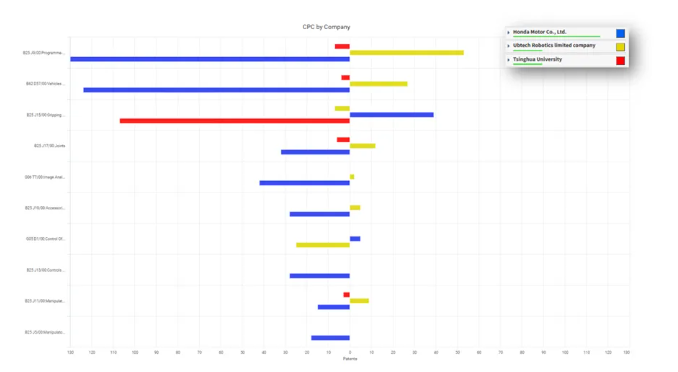
图6:技术构成对标分析
(Source:Innography 智能化信息分析平台)
通过Innography PatentScape功能继续对上述三个重点专利权人的技术构成进行进一步的分析,发现本田公司的专利主要讨论的话题集中在自主移动机器人、机器人的控制、控制信号、控制系统,显示出本田公司的研究重点可能在于机器人的信号控制;清华大学的专利主要讨论的话题集中在机器人的手部、手指、拇指、抓取动作、万向节传动轴等,显示出清华大学的研究重点可能在于机器人的手部和肘关节;而深圳优必选公司的专利主要讨论的话题集中在机器人的控制,谐波减速器和存储介质方面。谐波减速器是机器人中的用于实现精准运动和稳定负载的核心部件,而存储介质的研究通常是为了保障多模态传感器数据的存取效率,存储介质需要临时保存来自摄像头、力矩传感器等设备的原始数据,确保运动控制与感知系统的低延迟响应,并且,如舞蹈动作序列、抓取策略等预编程指令均需以来存储介质实现快速调用。由此可知,深圳优必选公司的研究重点可能在于机器人动作的稳定性和精度控制。而步态控制,是三个重点专利权人都有所涉猎的领域,可能是人形机器人领域的研究热点之一。
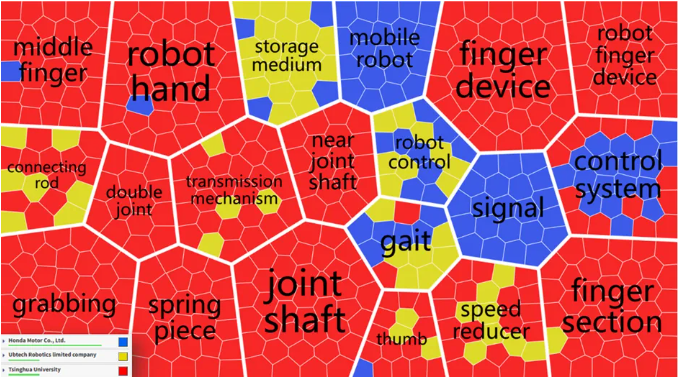
图7:Theme Scape分析
(Source:Innography 智能化信息分析平台)
对以上三个主要专利权人公开专利的DWPI新颖性字段进行文本聚类分析,可以对各专利权人的技术分支进行快速分解。对于清华大学,我们可以看到清华大学对于机器人的手部控制细化到了拇指、食指、小指等各个具体的手指分别进行控制;本田和优必选对机器人的步态控制都有所涉猎。不同的是,本田公司主要对步态参数、期望运动轨迹和落地姿态方面进行了深入研究,而深圳优必选公司更多的是在迈步、角速度和步长方面进行研究。
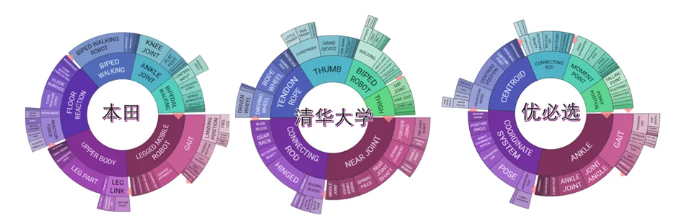
图8:文本聚类分析
(Source:Derwent Innovation 德温特创新平台)
进一步地,我们可以通过对重点专利权人公开的专利的发明人进行分析,寻找所关注的机构中的高产发明人,以及这些发明人之间的合作关系。以清华大学为例,在DDA中对清华大学的发明人绘制聚类图谱,其中每个发明人为一个标签,专利则以“小球”聚类的节点形式呈现。与单个发明人标签相连的节点代表这些专利是由单个发明人独立研发的,与两个以上发明人标签相连的节点则代表这部分专利为多个发明人合作研发。
分析可知,清华大学人形机器人研发领域主要存在两大主要研发团队,这两个团队之间为独立研发,相互之间不存在合作关系。对两个研发团队的专利进行分析发现,其中一个团队的研究聚焦于双足机器人步态控制方面,另一研发团队的研究则聚焦于机器人手指装置。在双足机器人步态控制研究团队内部存在多个高产发明人,如赵明国、杨东超、汪劲松、陈恳等,并且其所在的研究团队之间存在密切的合作关系。在机器人手指装置研究团队中,核心研究人员张文增与多个高产研究人员陈强、都东、孙振国之间都存在密切的合作申请的情况。
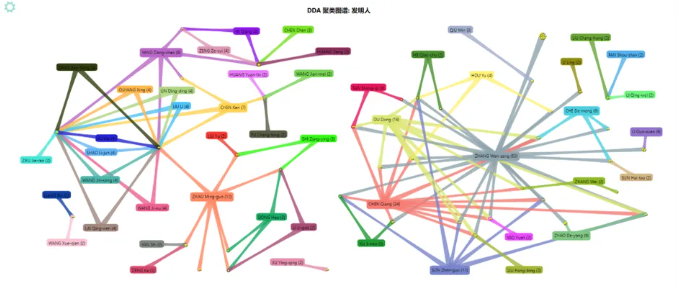
图9:发明人合作关系聚类分析
(Source:Derwent Data Analyzer 德温特数据分析软件)
结语
人形机器人技术是当前在全球范围内高度活跃的研究领域。随着运动控制与AI算法等技术的突破和执行器、谐波减速器等核心部件技术的成熟,人形机器人产业正从技术验证迈向规模化商用。相信通过政策支持、技术协同与产业链整合,将会加速人形机器人从实验室向工业化场景的规模化落地,进而向家庭服务、医疗护理等更广泛的应用场景场景进行渗透。